stereoRectifyUncalibrated returns degenerate homography matrix in some configurations (Bug #2643)
Added by Alexander Mordvintsev about 12 years ago.
Updated about 12 years ago.
| Status: | Done | Start date: | 2012-12-18 |
|---|---|---|---|
| Priority: | Normal | Due date: | |
| Assignee: | % Done: | 0% |
|
| Category: | calibration, 3d | ||
| Target version: | 2.4.3.2 | ||
| Affected version: | Operating System: | ||
| Difficulty: | HW Platform: | ||
| Pull request: |
Description
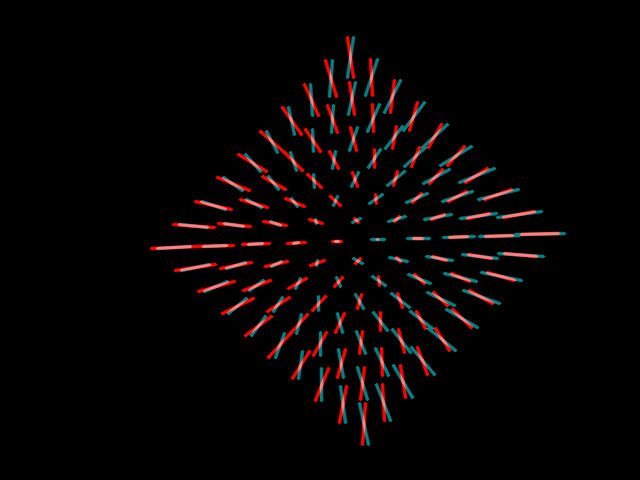
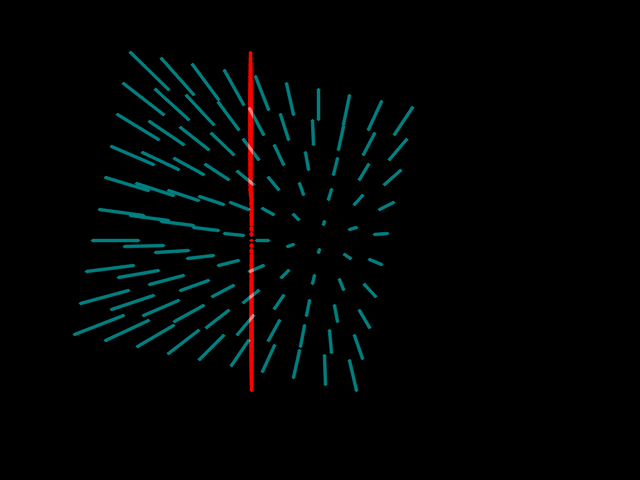
I attached a code sample which renders a simple synthetic 3d scene from two viewpoints and tries to rectify them. 'correct.png' shows the result I expect (and often get). 'wrong.png' is the case of degenerate homography. Note that the function's behavior may differ dramatically for very similar camera configurations.
{kind=link}
{kind=link}
Related issues
| related to Feature #2655: 'solve' fucntion works badly on ill-conditioned matrices ... | Open | 2012-12-21 |
Associated revisions
fix #2643: use SVD to solve least squares in cvStereoRectifyUncalibrated
Merge pull request #2643 from vbystricky:ipp_GaussianBorder
History
Updated by Alexander Mordvintsev about 12 years ago
Updated by Alexander Mordvintsev about 12 years ago
- Status changed from Open to Done
Updated by Alexander Smorkalov about 12 years ago
- Target version set to 2.4.4
Updated by Andrey Kamaev about 12 years ago
- Target version changed from 2.4.4 to 2.4.3.2